| Index / Reactive Boxes / Cells / Cinema Image / Edge / Tape_Machine / Catch / vModulator / IM / Plane_Modulator / Egg Machine / Dakadaka | ||
 |
 |
 |
||||||
| Reactive
Boxes As a precursor to developing larger computational sculptures, I devised a series of three studies to explore various ways of interacting with sculptural systems and to explore different types of sensors and motors. |
||||||||
 |
Physical Box Interacting with the physical box involves triggering one of two sensors mounted to the surface of the object. Triggering the right sensor causes the motor to turn clockwise while triggering the left sensor causes the motor to turn counterclockwise. Triggering both sensors at the same time causes the motion to stop. The box is completely analog. |
|||
|
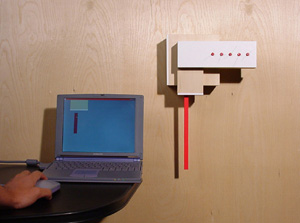
Remote Box The movement of the remote box is controlled by a microcontroller and the interaction is through a networked java application. A person can send a stimulus to the box by manipulating an abstract digital interface on a computer screen which sends a signal over a computer network. This stimulus triggers a motor inside the box and the time difference between signals determines the speed and rhythm of another motor which turns the wires on the face of the box. |
|||
|
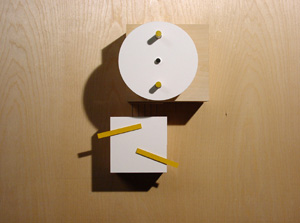
Ambient Box The ambient box moves in response to sound and light levels in its environment. A microphone attached to the front of the circular panel constantly monitors the sound level in the room and moves a motor attached to this panel quickly if there is a sudden change in the volume and slowly if the change is slight. The yellow rectangles on the bottom box are each attached to solar motors which release their energy as circular motion. |
|||
© 2001, 2000 | Casey Reas & MIT |
|